潘玲云,王慶林,張磊
(南京郵電大學(xué) 自動化學(xué)院,江蘇 南京 210003)
摘要:目前,國內(nèi)大多數(shù)衛(wèi)星通信業(yè)務(wù)是以固定站衛(wèi)星通信為主,無法實現(xiàn)在運動中通信。因而,基于衛(wèi)星通信的運動中通信設(shè)備-“車載動中通”系統(tǒng)應(yīng)運而生。文章研究了兩軸捷聯(lián)式車載移動衛(wèi)星通信地球站,可實現(xiàn)在運動中實時衛(wèi)星通信。車載“動中通”伺服控制系統(tǒng)主要研究系統(tǒng)硬件結(jié)構(gòu)、算法設(shè)計和系統(tǒng)建模與仿真。由于車輛行駛速度、路況的高度不確定性,車載“動中通”伺服系統(tǒng)采用模糊PID控制,對星策略采用圓錐掃描算法。系統(tǒng)仿真采用MATLAB中Simulink模塊完成,仿真結(jié)果表明,車載“動中通”伺服系統(tǒng)輸入與輸出的穩(wěn)態(tài)誤差很小,動態(tài)性能良好。
關(guān)鍵詞:車載“動中通”;伺服控制系統(tǒng);建模與仿真;圓錐掃描算法;模糊PID控制
0引言
車載“動中通”衛(wèi)星地球站主要應(yīng)用于自然災(zāi)害應(yīng)急通信、治安管理通信以及商業(yè)信息化等。我國地域廣闊、環(huán)境多樣,通信自然災(zāi)害時常發(fā)生,當(dāng)面對自然給基礎(chǔ)設(shè)施帶來的破壞,車載能夠第一時間為受災(zāi)區(qū)域與外界建立聯(lián)系,交互受災(zāi)情況信息,及時準(zhǔn)確地采取應(yīng)對措施。車載“動中通”可廣泛應(yīng)用于交通運輸、搶險救災(zāi)、新聞采訪、科考探險、公安和軍事等應(yīng)急和特殊通信領(lǐng)域,具有廣闊的市場需求[1] 。正因為這些優(yōu)勢,車載成為各國發(fā)展的重點項目。
伺服控制系統(tǒng)是車載“動中通”系統(tǒng)的核心組成部分,優(yōu)良的伺服控制系統(tǒng)是“動中通”能夠正常工作的重要前提[2]。伺服系統(tǒng)通過各種位置狀態(tài)傳感器、微處理器和驅(qū)動設(shè)施,隨動地調(diào)整系統(tǒng)天線的指向,保持天線穩(wěn)定地指向同一位置而不受載體姿態(tài)影響。跟蹤衛(wèi)星結(jié)合FuzzyPID算法和圓錐掃描算法,能夠快速準(zhǔn)確地捕獲目標(biāo)衛(wèi)星,并使得天線持續(xù)、穩(wěn)定地跟蹤目標(biāo)衛(wèi)星。
1伺服控制系統(tǒng)結(jié)構(gòu)設(shè)計
1.1伺服系統(tǒng)工作原理
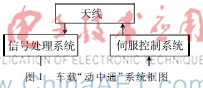
車載“動中通”主要由空間天線、信號處理系統(tǒng)和伺服控制系統(tǒng)組成。系統(tǒng)框圖如圖1所示。圖1車載“動中通”系統(tǒng)框圖其中天線用于指向同步衛(wèi)星接收和發(fā)送視頻、圖像、語音等信號[3]。信號處理系統(tǒng)用于調(diào)制解調(diào)空間信號,并通過功分器、信標(biāo)機等將空間信號轉(zhuǎn)換成一個直觀的數(shù)字量,將該數(shù)字量作為伺服控制系統(tǒng)的一個輸入控制量。伺服控制系統(tǒng)通過各種傳感器獲取天線指向狀態(tài),然后根據(jù)輸入控制量信息輸出相應(yīng)的輸出控制信號,來控制電機驅(qū)動天線修正其指向,以達(dá)到移動中對星、隨動跟蹤的功能。
1.2伺服隨動系統(tǒng)結(jié)構(gòu)設(shè)計
伺服控制系統(tǒng)是車載“動中通”系統(tǒng)的核心,天線的對星運動都是由伺服控制系統(tǒng)負(fù)責(zé)。該系統(tǒng)主要由單片機C0851F120、傳感器、存儲芯片、驅(qū)動電路、執(zhí)行電機組成。該伺服控制系統(tǒng)采用C8051F120作為其核心控制器[4],如圖2所示。

陀螺傳感器反饋天線的轉(zhuǎn)動角速度,控制器對該加速度進(jìn)行積分便可獲得轉(zhuǎn)動的角度,這使得天線可以智能地轉(zhuǎn)動各種指定角度;當(dāng)載體運動范圍比較大,需要重新測量天線理論方位俯仰時,GPS將測量當(dāng)前載體的經(jīng)緯度用于理論值的計算;傾斜儀測量天線俯仰相對于水平面的角度,根據(jù)傾斜儀的測量值可以知道天線的俯仰角值[5]。
傳感器將測量值反饋到控制器中,控制器對各反饋信息進(jìn)行識別、處理后產(chǎn)生控制信息,這些控制信息驅(qū)動著方位、俯仰及極化電機,帶動天線進(jìn)行初始化、盲掃、跟蹤和隨動,確保車載“動中通”系統(tǒng)能隨時發(fā)現(xiàn)并跟蹤鎖定衛(wèi)星以進(jìn)行實時通信。伺服系統(tǒng)結(jié)構(gòu)圖如圖3所示。
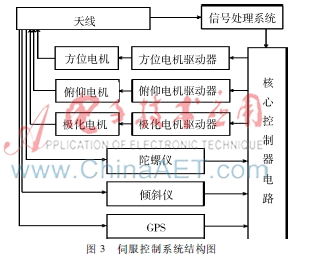
信號處理系統(tǒng)將一路信號輸出給伺服控制系統(tǒng)中的信標(biāo)機,信標(biāo)機能根據(jù)空間信號強度輸出一個相應(yīng)的模擬量或者數(shù)字量AGC,根據(jù)該AGC可以判斷天線指向是否接近并跟蹤上衛(wèi)星。
2伺服控制系統(tǒng)算法設(shè)計
該伺服系統(tǒng)采用模糊控制算法的FuzzyPID算法,防止衛(wèi)星跑偏;采用圓錐掃描算法使天線持續(xù)、穩(wěn)定地跟蹤目標(biāo)衛(wèi)星。該系統(tǒng)結(jié)合這兩種算法,能夠不斷調(diào)整自身的姿態(tài),從而克服因載體運動而產(chǎn)生的天線指向誤差,進(jìn)而實現(xiàn)實時跟蹤衛(wèi)星實現(xiàn)運動中不間斷通信。
2.1模糊PID算法
天線伺服控制系統(tǒng)若使用傳統(tǒng)PID控制器,當(dāng)理論值與實際值存在差值,積分環(huán)節(jié)就會不停地積分,最終可能會導(dǎo)致積分飽和[6],影響控制速度和精度,從而影響整個控制系統(tǒng)的性能。因此,車載“動中通”伺服系統(tǒng)使用模糊控制改變積分環(huán)節(jié)的控制。圖4為模糊PID算法流程圖。
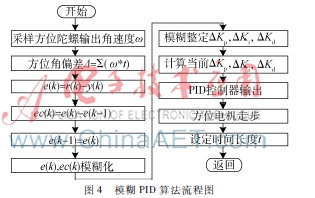
當(dāng)理論值與實際值的偏差變大時,說明天線移動的方向與衛(wèi)星方向背離[7],增大積分環(huán)節(jié),阻止天線偏離衛(wèi)星方向,將天線拉回衛(wèi)星指向;當(dāng)理論值與實際值的偏差變小時,說明天線移動的方向與衛(wèi)星方向靠近,減小積分環(huán)節(jié),天線指向逐步靠近衛(wèi)星方向。
2.2圓錐掃描跟蹤算法
無論載體怎么運動,天線都能始終準(zhǔn)確地指向衛(wèi)星,其關(guān)鍵在于天線的掃描算法[8]。該系統(tǒng)采用的是圓錐掃描跟蹤算法。驅(qū)動電機讓天線面繞指向衛(wèi)星的中心軸畫微小的圓,在捕獲到目標(biāo)衛(wèi)星之后,通過圓錐掃描運動反饋的狀態(tài)誤差對天線進(jìn)行閉環(huán)跟蹤補償。
在伺服控制系統(tǒng)中,信號處理系統(tǒng)將一路信號輸出給伺服控制系統(tǒng)中的信標(biāo)機,信標(biāo)機根據(jù)空間信號強度輸出一個相應(yīng)的模擬量或者數(shù)字量AGC,再根據(jù)該AGC來判斷天線指向是否接近并跟蹤上衛(wèi)星。
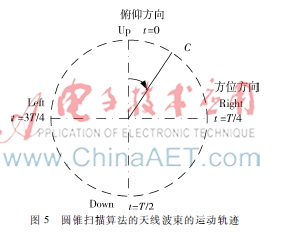
當(dāng)天線對準(zhǔn)目標(biāo)同步衛(wèi)星時,采集到的AGC信號是最大的,在采集到最大AGC信號的位置上下左右各采集4個點,以T為周期轉(zhuǎn)圈,則4個點的采集時間為:t=0、T/4、T/2、3T/4的AGC信號,采集到的4個點的AGC值應(yīng)該是相同的。如果不同,則表示天線的指向存在一定的偏差。不停重復(fù)這樣的掃描過程,不停地比較偏離方向來調(diào)整天線的姿態(tài),從而保證通信的穩(wěn)定和持續(xù)性。圓錐掃描算法的天線波束的運動軌跡如圖5所示。
記左右上下4點的AGC值分別為:L_AGC、R_AGC、U_AGC和D_AGC。實現(xiàn)程序如下:
if(i ==0)
R_AGC = CurrentAGC;
if(i ==TABLE_SIZE/4)
D_AGC = CurrentAGC;
if(i ==TABLE_SIZE/2)
L_AGC = CurrentAGC;
if(i ==TABLE_SIZE/4* 3)
圖6Simulink系統(tǒng)框圖U_AGC = CurrentAGC;
if(++i > = TABLE_SIZE) {
i = 0;
if(R_AGC >L_AGC) {
AZ_Error += DEGREE0_1;
}
else if(R_AGC <L_AGC) {
AZ_Error - = DEGREE0_1;
}
if(U_AGC>D_AGC) {
EL_Error + = DEGREE0_1;
}
else if(U_AGC< D_AGC) {
EL_Error - = DEGREE0_1;
}
}
3伺服系統(tǒng)模型搭建與仿真結(jié)果分析
為了驗證該系統(tǒng)的可行性,對車載“動中通”系統(tǒng)進(jìn)行了建模與仿真。車載“動中通”系統(tǒng)的建模與仿真建立在控制理論、相似理論、計算機理論的基礎(chǔ)上,根據(jù)系統(tǒng)構(gòu)成建立其數(shù)學(xué)模型并進(jìn)行仿真,驗證系統(tǒng)性能。
3.1系統(tǒng)模型搭建與仿真
(1)PWM功率放大電路數(shù)學(xué)模型
PWM功率放大電路其原理就是改變直流無刷電機輸入控制電壓的接通和斷開的占空比從而改變直流無刷電機電樞的轉(zhuǎn)動速度;當(dāng)輸入控制電壓的極性改變時,MOSFET管狀態(tài)會隨之改變,從而改變輸出控制電壓的極性,進(jìn)而改變直流無刷電機正轉(zhuǎn)或反轉(zhuǎn)。直流無刷電機輸入控制電壓的接通和斷開在第二個周期時輸出控制電壓才會改變。由于輸入控制電壓與輸出控制電壓存在時間差,因此PWM功率放大電路存在一定的滯后。式(1)中,Kpwm是電壓放大的倍數(shù),Ts表示輸入控制電壓與輸出控制電壓滯后時間。則功率放大電路的傳遞函數(shù)為:
H(s)=Kpwme-Tss(1)
對式(1)按泰勒級數(shù)展開,可以知道輸入控制電壓與輸出控制電壓的滯后時間非常小,因此高次項系數(shù)可以忽略,對式(1)進(jìn)行簡化為:

同時由于輸入控制電壓與輸出控制電壓的滯后時間Ts非常小,可以進(jìn)一步簡化為:
H(s)=Kpwm(3)
(2)傳感器數(shù)學(xué)模型
本文中的傳感器是對天線實時位置信號的反饋,因此傳感器數(shù)學(xué)模型可以用傳遞函數(shù)H(s)=1來表示。
(3)建立系統(tǒng)模型
在MATLAB仿真軟件中通過Simulink建立系統(tǒng)模型如圖6所示。

3.2仿真結(jié)果分析
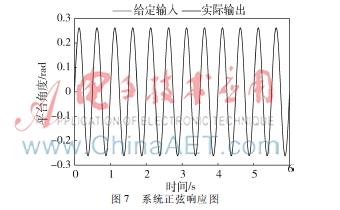
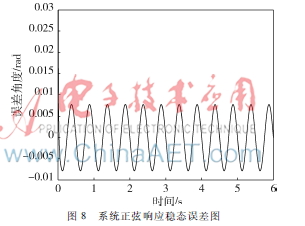
當(dāng)給輸入一個正弦控制信號時,正弦控制信號的幅度為π/12,設(shè)置頻率為2 Hz。正弦控制信號的輸出響應(yīng)圖如圖7所示。由圖7可以看出,給定輸入灰色部分與實際輸出黑色部分幾乎重合,因此系統(tǒng)具有較好的動態(tài)性能和跟蹤性能;系統(tǒng)穩(wěn)態(tài)誤差如圖8所示,由此可以看出系統(tǒng)的穩(wěn)態(tài)誤差小于0.008,說明系統(tǒng)的穩(wěn)定性較好。
車載“動中通”伺服控制系統(tǒng)通過GPS對當(dāng)前載體所在位置進(jìn)行測量,由設(shè)定的衛(wèi)星參數(shù)計算得到理論方位,將理論值與實際值的偏差送到伺服控制系統(tǒng)中,從而得出電機為縮小偏差值所要轉(zhuǎn)動的方向和角速度。天線運動后,再次計算理論值與實際值的偏差,不斷重復(fù)形成一個閉環(huán)控制系統(tǒng),逐步實現(xiàn)衛(wèi)星的實際值與理論值的吻合,進(jìn)而達(dá)到實時跟蹤。
4結(jié)論
本文主要對車載“動中通”衛(wèi)星通信系統(tǒng)中的伺服控制系統(tǒng)進(jìn)行設(shè)計。車載“動中通”衛(wèi)星通信系統(tǒng)的跟蹤同步衛(wèi)星的能力直接取決于伺服控制系統(tǒng)的穩(wěn)定性。經(jīng)過反復(fù)測試,該車載衛(wèi)星通信系統(tǒng)在各種假想的工況環(huán)境下,能夠在規(guī)定時間內(nèi)準(zhǔn)確對星并跟蹤,滿足設(shè)計性能指標(biāo)。
參考文獻(xiàn)
[1] 胡正飛,謝繼東. 便攜式衛(wèi)星通信地球站結(jié)構(gòu)及其控制系統(tǒng)設(shè)計[J].機電產(chǎn)品開發(fā)與創(chuàng)新,2006(3):46.[2] 梁佰祥.車載“動中通”衛(wèi)星地球站伺服控制系統(tǒng)的研究與設(shè)計[D].南京:南京郵電大學(xué),2012.
[3] 郭慶,王振永,顧學(xué)邁.衛(wèi)星通信系統(tǒng)[M].北京:電子工業(yè)出版社,2010.
[4] 張帥.一種新型的船用移動衛(wèi)星通信系統(tǒng)[D].南京:南京郵電大學(xué),2008.
[5] 周文虎.“動中通”用衛(wèi)星實現(xiàn)應(yīng)急通信[J].上海信息化,2010(8):4042.
[6] 陶永華.新型PID控制及其應(yīng)用[M].北京:機械工業(yè)出版社,1998.
[7] 韓春生,劉劍,汝福興,等.基于PID算法的船舶航跡自動控制[J].自動化技術(shù)與應(yīng)用,2012,31(4):912.
[8] 王鵬程.基于復(fù)合控制技術(shù)的陸上移動衛(wèi)星通信地球站設(shè)計與實現(xiàn)[D].南京:南京郵電大學(xué),2013.
