
引言
智能交通系統的研究領域十分廣闊,各國各地區的側重點也有所不同。如:電子收費系統是ITS在公路收費領域的具體表現,可解決收費站的“瓶頸”制約,較好地緩解收費站的交通擁擠、排隊等候以及環境污染等問題。為了滿足這些需求,十分有必要在智能交通管理系統引入車輛牌照自動識別技術。
汽車牌照是車輛最清晰、準確、唯一的標志。車輛牌照識別(Vehicle License Plate Recognition,簡稱VLPR)系統作為一個專門的計算機視覺系統,它能夠自動拍攝車輛行進中的動態數據,有效判斷和提取有車牌的圖像數據,并實時準確的識別出車輛牌照上的字符。
1 汽車牌照自動識別系統的實現流程
一個完整的汽車牌照
1.1 圖像采集與處理
圖像采集目前主要采用專用攝像機連接圖像采集卡,或者直接連接便攜式筆記本進行實時圖像采集,同時將模擬信號轉換為數字信號。圖像處理主要是對采集的圖像進行增強、恢復、變換等處理,目的是突出車牌的主要特征,以便更好地提取車牌區域。
1.2 車牌定位
從人眼視覺的角度出發,同時根據車牌的字符目標區域特點,在二值化圖像的基礎上,可以提取其相應的定位特征。這從本質上說,就是一個在參量空間尋找最優定位參量的問題,它需要用最優化方法予以實現。一般可計算邊緣圖像的投影面積,尋找峰谷點,大致確定車牌位置,再計算此連通域內的寬高比,剔除不在域值范圍內的連通域,最后得到的就是車牌區域。車牌定位是車輛牌照自動識別系統中的關鍵和難點,實際圖像中的噪聲、復雜的背景等干擾都會給定位增加困難。車輛牌照的分割是一個尋找最符合牌照特征區域的過程。
車牌檢測定位方法包括圖像預處理,車輛牌照粗定位,車輛牌照精確定位等幾個組成部分。圖2所示是本系統的車牌定位流程圖。
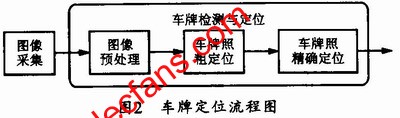
圖像預處理部分的功能是將已經變成電信號的信息加以區分,同時去除信號中的污點、空白等噪聲,并根據一定準則除掉一些非本質信號,再對文字的大小、位置和筆劃粗細等進行規范化,最后簡化判斷部分的復雜性。
車牌照粗定位部分將給出若干個待進一步判斷識別的候選車牌區域,如果候選區域的個數為零,則說明本幅圖像不含車牌,也就不用進行下一步的識別。
車牌照精確定位就是對車牌候選區域進行分類,以判斷哪一個是真正的車牌區域并給出車牌區域的坐標。
1.3 車輛牌照的字符分割
車輛牌照的字符分割是把經過定位后的車牌區域切分成若干個子區域,每一個子區域包含一個字符。字符分割的任務是把多行或多字符圖像中的每個字符從整個圖像中分割出來,使其成為單個字符。
對于一般的字符識別來說,其識別過程是從輸入的待識別字符(樣本)點陣圖形中提取描述該字符的特征,再根據一定準則來判定該樣本所屬的模式類別。因此,字符描述、特征提取與選擇、分類判決等是字符識別的三個基本環節。
2 車牌字符的識別
字符識別是車牌照識別系統的最重要的組成部分,該部分需要對圖像采集,圖像處理,車牌照定位,字符切分所得到的結果進行識別處理,以最終得到車輛牌照的字符。
本文論述的車輛牌照字符識別方法分為字符圖像預處理、特征提取、分類器設計等部分。
2.1 字符圖像預處理
字符圖像預處理就是對輸入的字符圖像進行處理,以使其變成某種特定的標準形式,使后續的特征提取和字符識別更容易進行。其主要功能有兩點:一是消除圖像中的噪聲,修正圖像斷線或粘連現象;二是通過各種線性、非線性歸一化方法,使變換后的圖像相對穩定,便于識別。
2.2 特征提取
特征提取的主要目的是從原始數據中抽取出用于區分不同類別的本質特征。由于不同的特征的適用性不同,故對不同效果的字符所提取的特征性能也不盡相同,因此,用單一的特征已經很難適應受多種條件影響的車牌照字符的識別。另外,由于不同特征的不同維之間所表示的意義也不太相同,且權重也可能相差很多,如果采用直接組合的方法,就會使權重較大的特征占主導地位,而忽略了權重較小的特征。要解決這種問題,可以采用特征向量歸一化法或者加權的辦法,將兩種特征通過加權的方法組合起來,從而達到組合使用兩種特征的目的。
2.3 分類器設計
分類器就是在特征空間中用某種方法將被識別對象歸為某一類別。其基本做法是在樣本訓練集的基礎上確定某個判決規則,以使按這種判決規則對被識別對象進行分類所造成的錯誤率最小或引起的損失最小。
采用神經網絡作為分類器時,需要有一定的訓練樣本,而且樣本個數不能太少,但是,本文的實驗環境中的車牌上,漢字、英文樣本較少,甚至某些漢字英文僅有一個或者幾個樣本,因而無法保證神經網絡的訓練程度。因此,本文采用模板匹配法。模板匹配法實際上就是采用多個標準樣本的距離分類器。通常可利用平均樣本法來計算樣本均值以將其作為每個類別的標準樣本,然后計算待識別樣本與標準樣本間的距離,最后選擇距離最小的標準樣本作為待識別的樣本類別。
通常采用的距離準則如下;
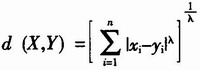
(1)Minkowsky距離
該距離是若干種距離的通式表示:
(2)“City block”距離
即街區距離,它是對Manhattan距離的修正,同時加上了權重。即:
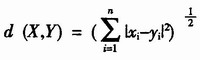
(3)Euclidean距離
即歐氏距離,是Minkowsky距離在λ=2時的特例,其優點是各點連續可微:
(4)Mahalanobis距離
即馬氏距離,它注意到樣本的統計特性,而排除了樣本間的相關性影響。它可表示為:
本設計選用了歐式距離。因為歐式距離可以只計算
,這樣可以降低計算時間。
3 結束語
本文提到的車牌照識別方法具有很好的識別效果,并可針對出現的漏識和識別錯誤等現象做出改進,預處理時還可對圖像亮度進行分析,針對過亮或者過暗的圖像采取不同的二值化策略;也可以根據字符識別的結果采用回溯方法來驗證車牌定位和字符切分的準確性;字符識別部分可增加字符模版的訓練樣本數量,而采用神經網絡作為分類器均可以提高字符識別的準確率。