
1 引 言
直流伺服驅動器憑借其優異的驅動性能,在工業、醫療、國防等領域有著廣泛應用。典型的直流伺服驅動器的結構如圖1-1所示。整個系統是由電流環、速度環和位置環構成的多環控制系統。傳統的伺服驅動器使用運放為核心的模擬電路構成,其有結構復雜、參數調整不易和系統性能易受環境影響等缺點。隨著微處理器技術、模擬數字接口技術和功率半導體技術的長足發展,現代的直流伺服驅動器普遍采用由微處理器為核心的數字控制系統。以微處理器為核心的伺服驅動器不但可以方便實現以前用模擬電路無法實現的控制算法,并且有著結構簡單、參數調整方便、系統性能對環境參數不敏感等優點。同時,數字控制系統還可以充分利用成熟的網絡連接技術,實現多機并行運行。
1-1
2 芯片特性簡介
SPMC752313A是μ’nSP™系列產品的一個新成員,是凌陽科技新推出的專用于電機驅動的16位微控制器。其擁有性能出色定時器和PWM信號發生器。可以方便的實現各種電機伺服驅動方案。
SPMC75F2313A在4.5V~5.5V工作電壓范圍內的工作速度范圍為0~24MHz,擁有2K字SRAM和32K字閃存ROM;最多33個可編程的多功能I/O端口;4個通用16位定時器/計數器(其中有一個電機驅動專用PWM波形發生器,一個位置偵測接口定時器),且每個定時器均有PWM發生的事件捕獲功能;2個專用于定時可編程周期定時器;可編程看門狗;低電壓復位/監測功能;8通道10位模-數轉換。在這些硬件外設的支持下SPMC75F2313A在電機控制領域有相當優秀的表現。SPMC75F2313A的特性如下:

3 系統總體方案介紹
本伺服驅動器主要由凌陽SPMC75F2313A、由IRF540組成的功率全橋和各種接口模塊組成,其結構框圖如圖 3-1所示。驅動器使用帶電流環的位置伺服結構,其中位置伺服環可根據需要選擇是否接入系統。驅動器使用20KHz的雙極性PWM,以保證系統良好的動態性能。
3-1
系統工作流程:
SPMC75F2313A接受來自各種控制接口的控制信息,并轉換成相應的電機控制信息。
SPMC75F2313A內部的電機驅動模塊依據控制信息和電機本身反饋的狀態信息產生PWM驅動信號,經MOSFET功率放大后驅動電機運行。同時,內建的保護電路隨時監示系統狀態,一旦系統異常,保護電路會立即動作,保護整個系統不會異常情況而損壞,同時提醒用戶檢查。
4 系統硬件設計
系統驅動部分的電路原理圖如圖 4-1。電路由主控MCU核心(SPMC75F2313A)、功率驅動電路(IRF540組成的功率橋)、MOSFET驅動保護電路、霍爾電流傳感電路、增量編碼器接口電路和DC/DC電源變換電路幾部分構成。其中SPM C75F2313A主要實現電機驅動所需PWM信號的產生、系統控制、人機接口等控制功能。
4-1
驅動電機所需的四路PWM信號由SPMC75F2313A內部的MCP定時器產生,信號由芯片的IOC端口輸出,經柵極驅動電路后驅動功率MOSFET(IRF540)。PWM信號經IRF540功率合成后輸出驅動直流伺服電機。
霍爾電流傳感器提供實時的電機工作電流信號,電流信號經SPMC75F2313A內部的ADC模塊AD轉換后供給電機驅動模塊使用。
增量編碼器接口使用SPMC75F2313A內部的PDC定時器實現,為SPMC75F2313A內部固化的電機驅動模塊提供位置和速度信息,從而完成系統的速度和位置控制。
系統保護電路由SPMC75F2313A內部MCP定時器的硬件保護邏輯和外部保護電路兩部分組成。保護電路會時刻監測系統工作狀態,一旦系統異常(過壓、欠壓、過流、過載等情況),保護電路會立時拉低MCP定時器的錯誤保護輸入端(IOC9),SPMC75F2313A內部的驅動硬件會立即禁止所有PWM輸出(變為高阻態),關斷所有功率器件,確保系統不會因這些異常情況而損壞。同時申請中斷,請求CPU對相應的事件進行處理。 由于其它模塊屬于通常的一些模塊,此處不再詳述。
5 系統軟件設計
整個系統軟件分為三部分:
1. 伺服電機的核心驅動模塊,這部分主要是產生電機驅動所用的PWM信號和相應的控制環路;
2. 系統控制程序;
3. 人機接口界面程序;
電機的核心驅動模塊的結構如圖 5-1所示,模塊使用經典的三環位置伺服結構。整個驅動模塊分為位置調節器、速度調節器、電流調節器、位置計算、速度計算和電流反饋幾部分構成。每個環節均使用改進的增量PID調節器(結構根據各個環路的特點而有不同),電流環的反饋速度為0.05ms,速度環的反饋速度為1ms,位置環的反饋速度10ms。
5-1
各控制環的核心服務子程序的流程如圖 5-2所示。這幾部分是整個系統的核心,其性能也決定了整個驅動器的性能。因此,這幾部分使用純匯編編寫,相應的PID算法也根據不同控制環的特點進行相應的結構調整和性能優化。以最大限度保證這幾部分程序的性能和實時性。
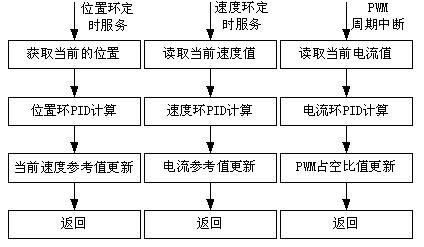
圖 5-2 PWM周期中斷服務子程序流程圖
系統控制部分是整個系統協調的心臟。整個系統都在其協調下有條不紊的工作。這部分主要是根據系統設置和當前系統的狀態給出相應的控制信息,以確保系統的可靠運行。
人機接口界面程序,這部主要是為用戶提供一個簡單易用的交互接口,以方便用戶對驅動器的可靠控制。包括驅動器的起停、各種運行參數的設置都在這一層面上進行。
6 結 語
通常,在開發伺服驅動設備的過程中,需要編寫實時性、程序可讀性強的代碼,這時就需要采用混合編程。而凌陽的m’nSP™ IDE具有良好的編程環境,它可以很輕松、容易地進行混合編程(在C程序中調用匯編程序,在匯編程序中調用C程序)。
該系統用了SPMC75F2313A三個定時器和約30個IO口資源,其實SPMC75F2313A的資源相當豐富。因其有專業的電機驅動硬件支持,電機驅動系統開發變得相對簡單。因此,基于SPMC75F2313A的電機伺服驅動器系統在工業、醫療、國防等領域有廣闊的應用前景。
參考文獻
[1] 雷思孝、李伯成、雷向莉等,單片機原理及實用技術—凌陽16位單片機原理及應用[M] 西安:西安電子科技大學出版社
[2] SUNPLUS,SPMC75x編程指南V1.6[M] 北京:SUNNORTH