
摘 要: 介紹了一種專門為旋挖鉆機的垂直起豎和井深測量而設計的控制系統" title="控制系統">控制系統的原理、實現方法和軟硬件構成等。該系統基于高性能八位微處理器Mega128而設計,集成了垂直度檢測、井深測量、垂直度控制和操作指示等功能。
關鍵詞: 旋挖鉆機 電液比例控制 Mega128 PID PWM
旋挖鉆機是一種用于建筑基礎工程中成孔作業的施工機械。它是以履帶為支承的回轉斗式旋挖鉆孔機械,其工作裝置由動力頭、伸縮鉆桿、加壓裝置和液壓系統等組成。
旋挖鉆機的控制屬于一般工業自動化應用領域,它要求一種廉價、節能、維護方便、適用于大功率控制及具有一定控制精度的控制技術,所以采用電液比例控制。它能夠接受模擬信號和數字信號,使輸出的流量或壓力連續成比例地受到控制。電液比例控制系統[1]有數字控制系統、脈寬調節(PWM)控制系統等。
旋挖鉆機鉆桅的垂直度直接影響到所鉆孔的質量,對于提高工程機械作業效率有著很重要的意義,保證其在要求的范圍內是控制系統應完成的主要任務。所以旋挖鉆機的控制方案為:根據操作員的指令,利用電液比例控制系統控制液壓缸運動,實現鉆具安全平穩起豎,進而保證旋挖鉆機鉆桅的垂直度在要求范圍內。同時,精確的井深測量也能極大提高工作效率。所以,它也是控制系統應完成的任務。
目前,國內外旋挖鉆控制系統的特點是其控制器的所有控制規律處理、輸入/輸出信號波形處理和功率放大等都由模擬電路進行,因此迫切需要改進。而旋挖鉆機控制的數字化正是目前提高旋挖鉆機工作性能的必然要求和發展趨勢。
1 計算機控制系統方案
控制系統方案如圖1所示。系統監測傾角傳感器信號、比例閥反饋信號、液壓缸位置傳感器信號和操縱桿發來的指令,根據控制算法" title="控制算法">控制算法產生控制數據,控制數據經過轉換算法產生控制量(PWM信號),并通過驅動電路控制電液比例閥,采用反饋控制技術實現兩個液壓通道的精確同步控制,克服了鉆具起豎過程中由于兩個比例方向閥參數不一致而造成的歪斜。

旋挖鉆機的正常工作還需要許多輔助系統,在本控制系統中包含有井深測量控制系統、故障檢測系統和保護控制系統。為滿足不同旋挖鉆機的控制需要,本系統還具有控制參數設置和旋挖鉆機工作過程參數顯示等功能。
2 主要技術指標
·垂直度(圓周)誤差<0.2°,也就是在兩個正交軸上,傾角誤差的平方和的平方根小于0.2°;井深測量誤差可控制在小于10cm的范圍內。
·提供穩定的±5V和±10V電壓接口,以滿足操縱桿和傳感器的用電要求。
·提供八路開關量輸出信號,用于系統保護、告警和狀態指示。
·可控制兩個三位四通比例換向閥,驅動電流大于2A。
·提供RS232接口,用于系統參數設定、故障檢測,并提供CAN總線接口,用于系統組網。
3 系統硬件配置
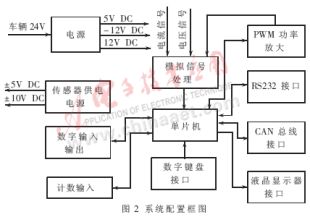
該控制系統主要由電源、傳感器供電電源" title="供電電源">供電電源、模擬信號處理、單片機、RS232接口、CAN總線接口、PWM功率放大、數字輸入輸出、計數輸入、液晶顯示器接口、數字鍵盤接口等部分組成,其配置框圖如圖2所示。
3.1 電源部分
電源部分結構圖如圖3所示,包括濾波、電源反接保護、過壓狀態輸出、欠壓狀態輸出、+5V穩壓輸出、±12V穩壓輸出、速熔保險等電路。應選用開關型穩壓模塊,以實現高輸入電壓下的低功耗穩壓輸出。本系統使用LM2575HVT-5.0和LM2575HVT-12.0電源模塊。電壓的輸出要有順序,首先輸出+5V電壓,然后在系統控制下輸出±12V電壓。
電源反接保護電路使用整流電橋。PWM功率放大器的電源要經過濾波器、速熔保險和電源反接保護電路。過壓和欠壓狀態輸出使用比較器實現,考慮了暫態問題。3.2 傳感器供電電源
傳感器的供電由以下幾部分組成:傾角傳感器直接使用電源供給的+12V穩壓直流電;霍耳傳感器" title="霍耳傳感器">霍耳傳感器直接使用+5V電源提供的穩壓直流電;操縱桿和液壓缸位置傳感器使用的是高穩定度的±5V和±10V電源。因此,傳感器供電電源主要為由基準電源和運算放大器組成的高穩定度的±5V和±10V電源。本系統中的運算放大器選用低噪聲、高精度的TS524I運算放大器。
3.3 模擬信號處理部分
模擬信號經本電路處理后,送入單片機的A/D" title="A/D">A/D轉換器和數字輸入端。為提高單片機系統端口的使用效率,本系統采用模擬開關(CD4053B)對比例方向閥反饋信號和單片機PWM輸出信號進行切換,以減少A/D轉換器輸入端口和PWM輸出端口的開銷。其主要組成框圖如圖4所示。

3.4 PWM功率放大器
PWM功率放大器是驅動電液比例方向閥的重要部件,為保障其可靠工作,又具備完善的保護措施,在設計中采用一種專用的PWM功率放大模塊BTS707。該模塊不僅具有兩路PWM輸出來驅動兩個三位四通比例換向閥,而且具有完善的保護功能和斷路檢測功能,可以及時發現電磁閥線圈故障,以便及時采取緊急處理措施。取樣電阻引回的反饋信號用于構成串聯負反饋回路,以穩定通過電磁閥線圈的電流,避免線圈溫度變化造成的驅動電流波動。
3.5 CAN總線接口
目前集成有CAN總線接口的單片機很多,一般均集成有1~4個CAN控制器,但這些芯片成本太高,本系統采用獨立的CAN控制器SJA1000并配合PCA82C250實現CAN2.0接口功能,其電路原理圖見圖5。考慮到抗干擾能力的需要,圖中的VB5是由+5V隔離電源提供的。

3.6 RS232接口
該接口的用途主要是提供人機接口,實現參數設定、故障檢測等功能。可直接利用單片機的UART口,配以RS232電平轉換芯片,方便地構成RS232接口。為保證系統產生準確的常用波特率,需要精心選擇單片機的時鐘頻率。RS232電平轉換電路采用MAX232A芯片[4]。
3.7 液晶圖形顯示器接口
液晶顯示器采用青云儀器廠生產的LCM320240ZK型帶漢字庫的液晶模塊,并配以照明電源、對比度調整電路等。為了提高控制器的工作效率和降低編程難度,并考慮到現場數據傳輸距離的限制,本系統使用一個專門的微處理器控制LCD。兩塊處理器之間的通訊通過SPI串行通訊接口實現。
3.8 數字鍵盤接口
數字鍵盤接口用于控制系統進入不同工作狀態,為簡化設計,同時充分利用單片機提供的I2C兼容接口,該數字鍵盤采用ZLG7290芯片進行設計,各功能鍵及狀態指示均在該芯片控制下。利用好ZLG7290提供的中斷信號,可提高系統響應速度,降低編程難度。
3.9 單片機、數字輸入輸出接口及計數器接口
單片機采用ATMEL公司的MEGA128芯片,針對本系統中的應用,它有以下優點:
(1) 采用了先進的RISC結構,工作于16MHz時性能高達16MIPS。
(2) 具有八路10位ADC,最高分辨率時采樣率高達15kSPS。
(3) 可提供兩路8位PWM控制信號和六路分辨率可編程的PWM控制信號。
(4) 豐富的定時器資源,具有四個硬件定時器。
(5) 提供I2C總線控制模塊、兩個UART口和SPI串行接口[2]。
在系統設計上,考慮了ISP編程接口。在初期設計的系統中,為了系統調試方便,采用了JTAG調試接口。
數字輸入輸出接口直接利用單片機的I/O口實現,計數器接口接收安裝在隨鉆細鋼絲繩滑輪上的霍耳傳感器的脈沖信號,根據該信號利用滑輪的轉數來計算井深,這里直接利用單片機的計數功能。
4 控制系統軟件
整個控制器、傳感器和液晶管理控制器所使用的微控制器都是工業級的。為開發方便,使用同一系列不同配置的微控制器,所有程序開發都使用C語言進行,開發軟件使用ICC AVR C6.28 軟件包,調試器使用ATMEL公司的JTAGE ICE,調試環境使用AVR Studio 4.10。
根據控制系統及比例方向閥的特點和需求進行分析可知,系統軟件需要完成的任務包括:數據檢測(包括A/D轉換、垂直度和位置指令脈寬測量等)、鍵盤掃描、LCD顯示、控制算法和PWM輸出、參數設定等。這些功能的實現需由mega128的下列資源來實現:通用I/O、 ADC、T0~T3定時器、中斷系統等。
由于管理LCD顯示的是單獨的微控制器,所以只需將液晶顯示模塊所用功能編寫成例程,控制器只發送控制命令,液晶控制器接收命令后對顯示模塊進行具體控制即可。這里只介紹主控制器的軟件實現。
4.1 主程序
主程序首先要實現系統初始化,包括端口初始化、定時器初始化、中斷設置等。
主程序處于循環狀態,主要完成參數檢測和向LCD控制器發送顯示狀態命令等,直到發出關閉指令為止。
4.2 中斷控制
控制軟件要實現多個任務。對各個任務的調度和管理以及重要任務的實時執行,就需要對各個中斷精確規劃和協調。
控制軟件中共用到定時器中斷、外部中斷、UART0中斷、I2C總線中斷、SPI中斷、A/D轉換完成中斷等中斷。其功能如下:
(1)T0定時器溢出中斷用于實現采樣周期定時。
(2)T2定時器溢出中斷用于對測量井深的霍耳傳感器進行計數溢出中斷。
(3)外部中斷用于實現轉向的檢測和操縱桿鎖定信號檢測。
(4)A/D 轉換完成中斷用于操縱桿指令和垂直度的轉換。
(5)UART0中斷用于控制系統,使之通過串口與PC機進行數據交換。
(6)I2C總線中斷用于通過中斷實現總線協議,掃描鍵盤并完成數據傳送。
(7) SPI中斷用于主控制器向LCD控制器發送顯示命令。
并不是每個中斷都自始至終發揮作用,而是在不同階段,有些中斷使能,其余禁止,且同一中斷在旋挖鉆機工作的不同階段,其優先級也會有所不同。通過靈活的中斷設置與協調,可實現實時任務和非實時任務的調度管理。
4.3 控制規律設計
為了迅速、穩定、可靠地完成旋挖鉆機垂直起豎控制,整個控制過程分為手動控制和自動搜尋控制。
4.3.1 手動控制
手動控制采用開環控制使驅動旋挖鉆機的兩個液壓缸在操縱員的控制下滿足如下三種不同工作要求:當操縱桿只有俯仰指令而無滾轉指令時,其中一個液壓缸的運動跟隨另一個液壓缸的運動;當操縱桿只有滾轉指令而無俯仰指令時,兩個液壓缸作差動運動;當操縱桿既有俯仰指令又有滾轉指令時,則兩個液壓缸的運動是上述兩個運動的合成運動。
4.3.2 自動控制
當手工操作鉆桅進入自動搜尋區域時,則按下操縱桿上的自動搜尋按鈕,單片機系統便斷開操縱桿指令,利用角位置傳感器信號控制液壓缸運動,并按正交搜索策略搜索。整個控制在T0的中斷中實現。程序流程圖見圖6。

?

4.4 PID 控制算法
為了方便更改PID控制參數,加快調試參數的效率,在進入閉環控制后,通過外部按鍵進入參數設定狀態,此時暫時退出閉環控制;然后通過按鍵分別設置Kp、Ki、Kd等參數,當新的參數投入使用后,重新進入閉環工作狀態。PID控制算法程序流程圖見圖7。
參考文獻
1黎啟柏.電液比例控制與數字控制系統.北京:機械工業出版社,1997
2丁化成,耿德根,力君凱.AVR單片機應用設計.北京:北京航空航天大學出版社,2002
3 沈 文, Eagle lee, 詹衛前. AVR單片機C語言開發入門指導.北京:清華大學出版社,2003
4 求是科技.單片機典型模塊設計實例導航.北京:人民郵電出版社,2004