
步進電機是一種將電脈沖信號轉換成相應的角位移的特殊電機,每改變一次通電狀態,步進電機的轉子就轉動一步。
目前大多數步進電機控制器需要主控制器發送時鐘信號,并且要至少一個I/O口來輔助控制和監控步進電機的運行情況。在單片機或DSP的應用系統中,經常配合CPLD或者FPGA來實現特定的功能。本文介紹通過FPGA實現的步進電機控制器。該控制器可以作為單片機或DSP的一個直接數字控制的外設,只需向控制器的控制寄存器和分頻寄存器寫入數據,即町實現對步進電機的控制。
1 步進電機的控制原理
步進電機是數字控制電機,它將脈沖信號轉變成角位移,即給一個脈沖信號,步進電機就轉動一個角度,因此非常適合對數字系統的控制。步進電機可分為反應式步進電機(簡稱“VR”)、永磁式步進電機(簡稱“PM”)和混合式步進電機(簡稱“HB”)。
步進電機區別于其他控制電機的最大特點是,通過輸入脈沖信號來進行控制,即電機的總轉動角度由輸入脈沖數決定,而電機的轉速由脈沖信號頻率決定。
步進電機的驅動電路根據控制信號工作,控制信號由各類控制器來產生。其基本原理作用如下:
①控制換相順序,通電換相。這一過程稱為“脈沖分配”。例如:四相步進電機的單四拍工作方式,其各相通電順序為A-B-C-D。通電控制脈沖必須嚴格按照這一順序分別控制A、B、C、D相的通斷,控制步進電機的轉向。如果給定工作方式正序換相通電,則步進電機正轉;如果按反序換相通電,則電機就反轉。
②控制步進電機的速度。如果給步進電機發一個控制脈沖,它就轉一步,再發一個脈沖,它會再轉一步。兩個脈沖的間隔越短,步進電機就轉得越快。調整控制器發出的脈沖頻率,就可以對步進電機進行調速。
2 控制器的總體設計
控制器的外部接口電路如圖1所示。各引腳的功能如下:
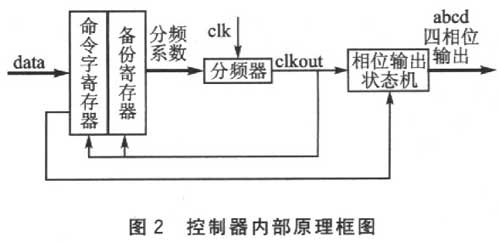
控制器的內部原理框圖如圖2所示,由命令字寄存器(Cmd_reg)、分頻系數備份寄存器(fdiv_back)、分頻器、相位輸出狀態機組成。
其中命令字寄存器Cmd_reg組成如下(對應的地址為“00”):

X未用位。
Ini對控制器初始化為1時有效。當該位為1時,備份寄存器的數據直接裝入分頻器的寄存器reg_dATA[15~0],裝入后由硬件自動置O。
Newr當對正在運行的控制器寫入新的分頻系數時,對該位置1;當下一個分頻器輸出的clkout時鐘來到時,將fdiv_back寫入到reg_data[15~0]中,分頻器便按新的分頻系數進行分頻。
Manner[1~0] 電動機的驅動方式,用來控制相位輸出狀態機的輸出,“00”表示單四拍方式,四相位輸出為(A-B-C-D);“Ol”表示雙四拍,四相位輸出為(ABBC-CD-DA),八拍(A-AB-B-BC-C-CD-DDA)。
分頻系數備份寄存器(fdiv_back) 兩字節寄存器,reg_data[15~0]為分頻器的一個16位寄存器,接收fdiv_back的值,對系統的分頻為2~65536。對于12MHz的輸入頻率,分頻后頻率為6MHz~183Hz,(本設計中,步進電機的啟動轉速、轉距、加速度由使用者根據實際情況自己計算)分頻后每個clkout走一個步距角。對于步距角為1.8°的電機,可以滿足各種速度的要求。
3 分頻器的設計
分頻器是該控制器實現的關鍵,在這里作為一個獨立的模塊,dATA[15~0]為分頻系數。系統時鐘Clk被分頻系數寄存器中值分頻后,輸出Clkout作為相位輸出狀態機的時鐘,每個Clkout到來時,產生一次相位轉換,步進電機運行一個步距角。分頻器的程序如下:
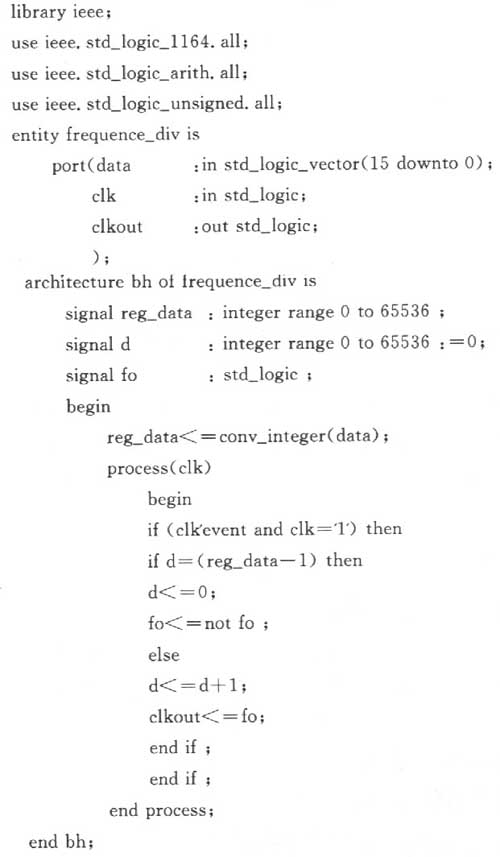
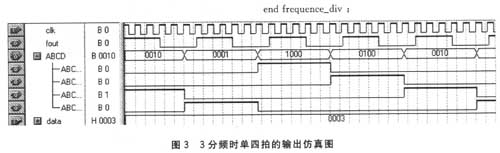
圖3所示為3分頻時單四拍的輸出仿真圖
結語
本文的創新點為將該步進電機控制器的控制字和分頻系數映射在主控制器(DSP或單片機等)的內存空間,控制時僅需對其進行寫操作,使步進電機的控制變得簡單方便;而且,可節省主控制器(DSP或單片機等)的外圍資源,減少板上負載。系統中可以加入電機運行總步數控制寄存器及其電路、加速度寄存器及其控制電路等,打造一個更智能的步進電機控制器。